


【2025年版】脳卒中患者の歩行における筋シナジー(Motor Modules)の変化とリハビリ戦略とは?
脳卒中患者の平地歩行と不整地歩行における筋シナジーの変化とリハビリ戦略
― リハビリテーション医師金子先生が新人療法士丸山さんに解説 ―
1. はじめに:脳卒中と歩行の適応
金子先生:「丸山さん、今日は脳卒中患者の平地歩行と不整地歩行における筋シナジーの変化について話そう。特に、筋シナジー(motor modules) の視点から、なぜ脳卒中患者が不整地歩行を苦手とするのか、リハビリのポイントは何かを解説するよ。」
丸山さん:「よろしくお願いします!患者さんが不整地でバランスを崩しやすいのは感覚障害や筋力低下のせいだと思っていましたが、筋シナジーの観点でも違いがあるんですね。」
金子先生:「そうなんだ。特に歩行の適応において、脳卒中患者の筋シナジーは減少し、多様な環境に対応しにくくなる という特徴があるよ。まずは、筋シナジーとは何か、そして脳卒中がそれにどう影響するのかを整理していこう。」
2. 筋シナジー(Motor Modules)とは?
筋シナジーとは、運動制御のために中枢神経系が複数の筋を協調させて動員するメカニズムである。
特に歩行では、健常者は4~5つの基本的な筋シナジーを使用 するのに対し、脳卒中患者ではシナジーが減少し、2~3つに統合される ことが報告されている(Clark et al., 2010)。
| 筋シナジーの比較(平地歩行) | 健常者 | 脳卒中患者 |
|---|---|---|
| 前遊脚期(初期接地) | 脛骨筋・大腿四頭筋 | 脛骨筋+大腿四頭筋が過剰に同時収縮 |
| 立脚期(中間立脚) | 下腿三頭筋・ハムストリングス | ハムストリングスが適切に活動せず、バランスが不安定 |
| 後遊脚期(蹴り出し) | 腓腹筋・ハムストリングス | 腓腹筋の活動が低下し、推進力低下 |
金子先生:「脳卒中患者では、例えば足関節背屈(脛骨筋)と膝伸展(大腿四頭筋)の協調性が低下する ことで、足が引っかかりやすくなる。だから不整地ではさらに適応しにくくなる んだ。」
3. 不整地歩行での変化
平地歩行と異なり、不整地では視覚や前庭感覚のフィードバックが増加し、適応的な筋活動が求められる。
しかし脳卒中患者では、シナジーが減少しているため適応が難しくなる。
| 筋シナジーの比較(不整地歩行) | 健常者 | 脳卒中患者 |
|---|---|---|
| バランス保持 | 前庭・視覚フィードバックを適切に活用 | 視覚依存が強まり、前庭系の適応が低下 |
| 重心移動 | 腓腹筋とハムストリングスの適応がスムーズ | 過剰な前脛骨筋の緊張による歩行の硬直化 |
| 適応反応 | 地面の不規則性に対し即座に反応 | 筋の協調性低下により、遅延した反応や転倒リスク増大 |
丸山さん:「なるほど…不整地では歩行速度の低下だけでなく、適応の遅れも起きるんですね。」
金子先生:「その通り。では、これを改善するためのリハビリアプローチを考えよう。」
4. リハビリアプローチ
(1) 平地歩行のシナジー強化
- 課題指向型トレーニング(Task-Oriented Training)
→ 例:段差昇降を取り入れ、脳の適応能力を高める - 電気刺激(FES:機能的電気刺激)
→ 例:脛骨筋と下腿三頭筋の協調を促進
(2) 不整地歩行への適応訓練
- 視覚依存を減らす訓練
→ 例:アイマスク歩行 で前庭系・体性感覚の活性化 - 重心移動のコントロール訓練
→ 例:左右の重心移動を意識したトレッドミル歩行 - シナジーの強化
→ 例:BWS(体重免荷トレッドミル)で安全に歩行練習
5. まとめ
金子先生:「丸山さん、今日のポイントを整理すると、」
- 脳卒中患者は筋シナジーが減少し、適応能力が低下している
- 平地歩行と不整地歩行では異なる適応メカニズムが必要
- リハビリでは、視覚・前庭・体性感覚を統合したアプローチが重要
丸山さん:「なるほど!患者さんの歩行を観察する際に、シナジーの視点を持つと問題点が明確になりますね。」
金子先生:「その通り。特に不整地歩行は転倒リスクが高いため、シナジーの強化を意識してリハビリを組み立ててみよう。」
論文内容
カテゴリー
神経系
タイトル
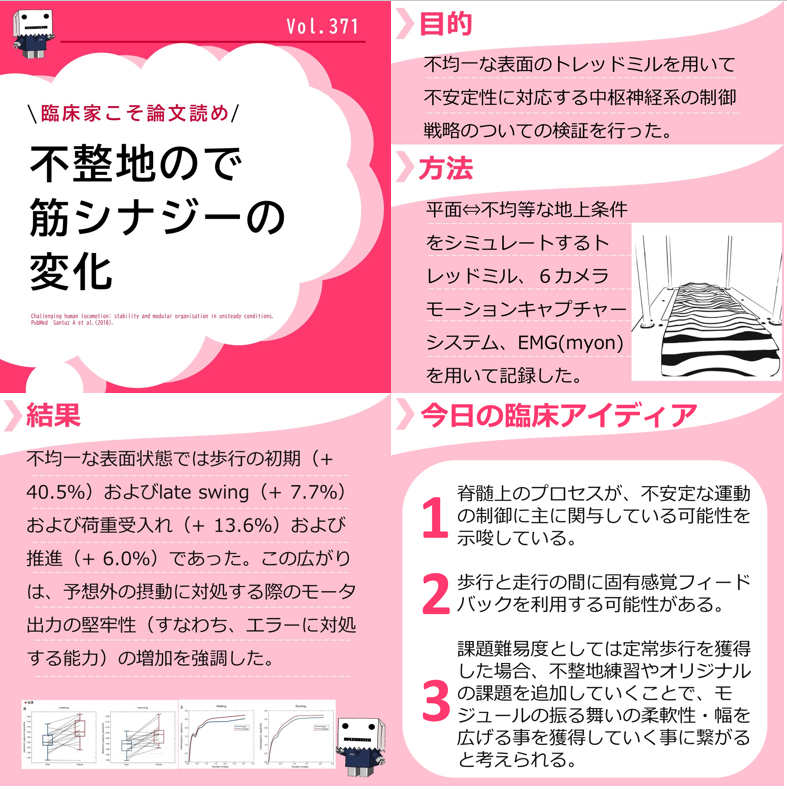
不整地におけるMotor modulesの変化
Challenging human locomotion: stability and modular organisation in unsteady conditions.PubMed Santuz A et al.(2018)
なぜこの論文を読もうと思ったのか?
・CPGs、筋シナジー(motor modukes)、固有感覚受容器の振る舞いに興味があり、本論文に至る。
内 容
背景・目的
・不均一な地形の移動は毎日の必要な課題です。地形の形態の変化による予想外の摂動に対して中枢神経系はその制御戦略を柔軟に変更しなければなりません。我々は、不均一な表面の移動時(不均一な表面のトレッドミル上)において安定性の低下とモジュラー制御の再編成を仮定した。
・我々は、平坦な表面から平坦でない表面の動きに切り替えるときの安定性の低下を発見した。
・不均一な表面のトレッドミルを歩いて走っているときに、神経筋出力の異なるモジュラー構成を採用することによって、人間が増加した不安定性に対応することを期待しました。
方法
・18人の健常成人および若年成人が募集された(男性11人、女性7人、身長176±7 cm、体重71±13 kg、年齢24±3歳)。すべての参加者は定期的に活動的で、装具インソールを使用しなかった。
・平面⇔不均等な地上条件をシミュレートするトレッドミル、6カメラモーションキャプチャーシステム、EMG(myon)を用いて記録した。
結果

・我々の結果は、人間が不安定な運動に対処するためにモータ制御戦略のタイミングを調整するという仮説を確認した。
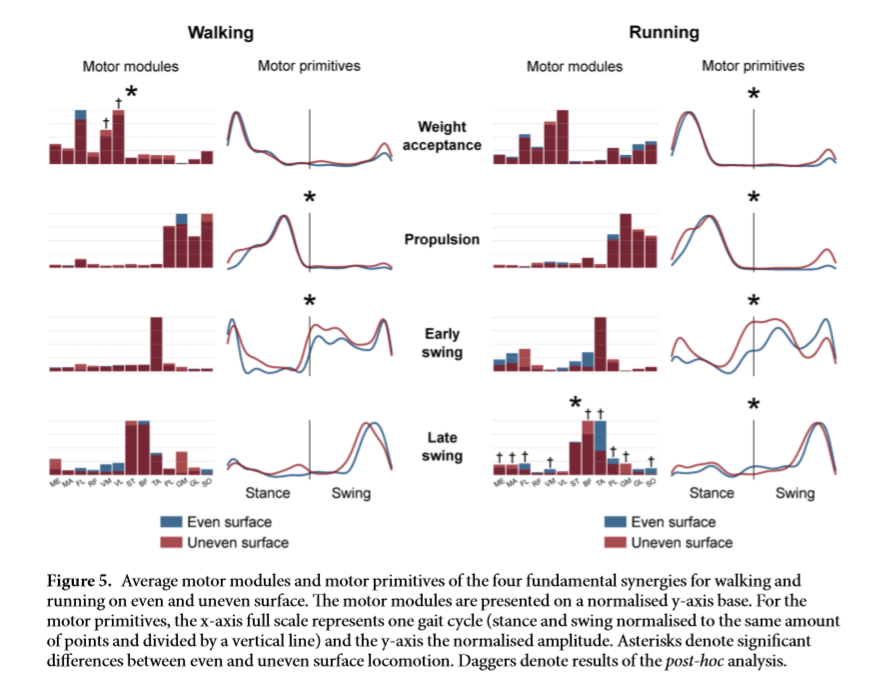
・時間依存性の筋肉活性化パターン(motor primitives)の実質的な変更を観察した。不均一な表面状態ではそれはかなり広いものでした。具体的には、歩行の初期(+ 40.5%)およびlate swing(+ 7.7%)および荷重受入れ(+ 13.6%)および推進(+ 6.0%)であった。この広がりは、予想外の摂動に対処する際のモータ出力の堅牢性(すなわち、エラーに対処する能力)の増加を強調した。
・摂動した定常状態の運動中に一貫した一連の(基本的なモジュラー制御)神経制御要素の使用を実証したが、基本的な活性化パターンを修正した。これは、連続的に変化する摂動の存在下で、正確な運動制御からより頑強な運動制御への移行を示した。
・脊髄上のプロセスが、不安定な運動の制御に主に関与している可能性を示唆している。歩行と走行の間に固有感覚フィードバックを利用する可能性がある。
私見・明日への臨床アイデア
・障害物をまたぐ歩きやボールを蹴りながら歩くなど通常の歩行に近い運動では、5つの基本的な波形の組み合わせに新たに波形を1つ追加する事で説明できるとしている。(2006 Y.PIvanenko et al.Motor control programs and walking ,Neuroscientist,12-4,339/348)
・走行では、5つの内の1つの時間波形の位相がずれることが示されている。(2006 G.Cappellini,Y.P.Ivanenko et al. Motor patterns in human walking and runnig,J.Neurophysiol.,95,3246/3437)
・課題難易度としては定常歩行を獲得した場合、不整地練習やオリジナルの課題を追加していくことで、モジュールの振る舞いの柔軟性・幅を広げる事を獲得していく事に繋がると考えられる。
筋シナジーを意識した脳卒中歩行リハビリの実践
― 患者との対話形式で解説 ―
1. 初回評価:歩行の特徴を把握する
セラピスト(以下、S):「○○さん、今日は歩行のリハビリをしていきますね。普段歩くとき、どんなところが難しいと感じますか?」
患者(以下、P):「右足(麻痺側)がうまく前に出せなくて、引っかかる感じがします。特に外では怖くて、足を引きずることが多いです。」
S:「なるほど。まず歩く様子を観察させてください。いつものように歩いてみましょう。」
▶ 観察ポイント
- 初期接地(踵が地面に着くか)
- 立脚期(体重を支えられているか)
- 遊脚期(足がスムーズに振り出されるか)
- 筋シナジーの崩れ(例えば、過剰な共同運動があるか)
S:「○○さんの歩き方を見ていると、脛骨筋(すねの筋肉)がうまく働かず、足が引っかかりやすい ですね。また、大腿四頭筋(ももの前の筋肉)が過剰に働いていて、膝が伸びたままになりやすいです。」
2. 歩行リハビリの計画
S:「歩行をスムーズにするには、適切な筋シナジー(motor modules)を引き出す ことが重要です。まずは以下の3つの段階でリハビリを進めましょう。」
| 段階 | 目標 | 具体的なトレーニング |
|---|---|---|
| ① 筋シナジーの再学習 | 適切な筋活動のパターンを作る | 体重支持のトレーニング、電気刺激 |
| ② 適切な歩行パターンの誘導 | 共同運動の抑制、適切な筋の協調 | トレッドミル歩行、段差昇降 |
| ③ 不整地や屋外歩行へ適応 | バランス能力向上 | 不整地歩行、反応速度トレーニング |
3. 筋シナジーの再学習
S:「まず、正しい筋シナジーを引き出すために、立った状態で体重移動のトレーニング から始めます。」
▶ 体重移動トレーニング
- 方法:「足を肩幅に開いて立ち、ゆっくり左右に体重を移動してみましょう。」
- 狙い:脳卒中後に崩れやすい 立脚期の筋シナジー(下腿三頭筋とハムストリングスの協調) を促す
P:「右に体重を移すのはできるけど、左に移すのが難しいです。」
S:「では、左に移動するときにお尻の筋肉(大臀筋)を意識 してみましょう。少し手を添えてサポートしますね。」
▶ 電気刺激(FES)の活用
- 適用部位:脛骨前筋(足を持ち上げる筋肉)
- 方法:FESを使いながら、つま先を引き上げる練習
- 狙い:遊脚期の筋シナジー強化(脛骨筋+ハムストリングス)
4. 適切な歩行パターンの誘導
▶ トレッドミル歩行
S:「次に、トレッドミルを使ってみましょう。ゆっくりした速度から始めますね。」
- 目的:一定のリズムで歩くことで、適切な筋シナジーパターンを強化
- ポイント:
- 踵から接地できるように意識
- 腕を振ることで歩行リズムを作る
P:「最初は怖いですが、慣れてくるとリズムがつかめますね。」
S:「いいですね!では少し速度を上げて、歩幅を広げてみましょう。」
▶ 段差昇降トレーニング
- 方法:低い段差を使って、片足ずつ上げ下げ
- 狙い:
- 立脚期の筋シナジー(ハムストリングス+腓腹筋)の強化
- 膝が過剰に伸びるのを防ぐ
5. 不整地歩行へ適応
S:「最後に、不整地を歩く練習をしてみましょう。」
▶ 不整地歩行トレーニング
- 方法:マットや砂利道をゆっくり歩く
- 狙い:視覚に頼らず、前庭・体性感覚を使った歩行適応
P:「やっぱり不整地だと足が思うように動かないですね。」
S:「そうですね。では、まず目線を遠くに向けて歩く ようにしましょう。視覚に頼りすぎず、体全体でバランスをとるのが大事です。」
▶ 反応速度向上のためのトレーニング
- 方法:音や合図に合わせて歩行速度を変える
- 狙い:筋シナジーの適応力を向上させ、反応速度を改善
6. まとめ
S:「今日の歩行リハビリでは、以下のポイントを意識しましたね。」
- 筋シナジーを意識して、適切な筋の協調を引き出す
- 体重移動や電気刺激で基本的な筋活動を促す
- トレッドミル歩行や段差昇降で適切な歩行パターンを強化
- 不整地歩行で環境適応能力を向上させる
P:「今日は自分の歩き方のクセがよく分かりました。リハビリを続けて、もっとスムーズに歩けるようになりたいです!」
S:「そうですね。筋シナジーを意識しながら、少しずつ練習を続けていきましょう!」
筋シナジーを意識した脳卒中歩行リハビリにおける新人療法士の注意点
1. 筋シナジーの理解不足による誤ったアプローチ
【注意点】
- 筋シナジー(motor modules)とは、複数の筋が協調して動く運動パターン のこと。
- 脳卒中後は、正常な筋シナジーが崩れ、過剰な共同運動(例:股関節・膝・足関節の伸展パターン)が生じやすい。
- 過剰な代償運動を許容すると、誤った筋シナジーが強化されてしまう(誤学習)。
【具体的な誤ったアプローチ】
❌ 代償動作を許容したまま繰り返す
→ 例:「足が引っかかるから」と、麻痺側の股関節を過剰に持ち上げる(登山歩行)クセを放置
❌ 筋力強化だけを目的にする
→ 例:麻痺側の大腿四頭筋(ももの前)ばかり鍛えると、膝が過剰に伸展し、歩行の安定性を損なう
✅ 適切な運動パターンを繰り返し練習することで、脳の再学習(neuroplasticity)を促すことが重要!
2. 初回評価で見逃しがちなポイント
【注意点】
- 初回の歩行観察では、「どの筋が弱いか」だけでなく、「どの筋が過剰に働いているか」も評価する
- 片麻痺患者では過剰な筋活動による非効率な歩行パターン が多い
- バイオメカニクス的な視点を持ち、代償パターンを見極める
| 歩行の問題 | 原因となる筋の過剰活動 | 適切な修正アプローチ |
|---|---|---|
| 麻痺側の足が引っかかる | 股関節屈曲筋の過剰活動 | 脛骨筋(すね)を活性化、電気刺激 |
| 立脚期に膝が伸びすぎる | 大腿四頭筋の過剰活動 | ハムストリングス強化 |
| 足関節が内反する | 下腿三頭筋(ふくらはぎ)の過剰活動 | 足底の感覚入力を増やす |
3. トレーニング時の誤学習を防ぐポイント
① トレッドミル歩行の誤った指導
❌ 手すりを強く握らせる
→ 上肢に頼ると体幹の安定性が低下し、適切な筋シナジーが得られない
✅ 軽く手を添える程度にし、体幹・下肢の協調を意識させる
❌ 過剰にゆっくり歩かせる
→ ゆっくり歩きすぎると、正常な筋シナジーのパターンが作られにくくなる
✅ 患者の能力に応じた適切なリズムで歩行を促す(一定の歩行速度が神経可塑性に有効)
② 不整地歩行での誤った練習
❌ 視覚に頼りすぎる
→ 地面ばかり見て歩くと、前庭・体性感覚のフィードバックが弱まり、バランス能力が向上しない
✅ 目線を前方に向け、姿勢のバランスを取るよう指導する
❌ 安全対策を怠る
→ バランスを崩しやすい患者に急に不整地歩行をさせると転倒リスクが高い
✅ まず平地で適切な歩行パターンを確立してから、不整地に進む
③ 電気刺激(FES)の誤った適用
❌ 適切なタイミングで刺激を与えない
→ 例:脛骨筋にFESをかける際、歩行サイクルの遊脚期に適用しないと効果が得られない
✅ 実際の歩行と同期させた刺激を行う(タイミングが重要)
4. 練習の負荷設定とモチベーション管理
【注意点】
- 過剰な負荷 → 代償動作が強化され、誤学習につながる
- 負荷が低すぎる → 効果が出にくく、患者のモチベーション低下
【適切な負荷設定の基準】
✅ 70-80%の成功率を維持する(難しすぎず、簡単すぎず)
✅ 「できた!」と感じられるレベルで練習を進める(達成感が神経可塑性に好影響)
【患者のモチベーション管理】
- 小さな成功を積み重ねることが大切
- 「前よりスムーズに歩けていますね!」と具体的なフィードバックを与える
5. まとめ:新人療法士が意識すべきポイント
✅ 1. 筋シナジーを理解し、適切な運動パターンを誘導する
✅ 2. 初回評価で過剰な筋活動・代償運動を見逃さない
✅ 3. トレーニング時に誤学習を防ぎ、適切な負荷設定を行う
✅ 4. 電気刺激や歩行補助具を適切に活用し、誤った使い方を避ける
✅ 5. 患者のモチベーションを維持し、継続しやすいリハビリを提供する
結論:誤学習を防ぎ、適切な歩行リハビリを提供するために
新人療法士にとって、脳卒中患者の歩行リハビリは単に「歩かせる」ことではなく、適切な筋シナジーを引き出し、誤った運動パターンを防ぐことが重要 です。
正しい評価とトレーニングで、患者の歩行能力を最大限に引き出せるよう心がけましょう!
退院後のリハビリは STROKE LABへ
当施設は脳神経疾患や整形外科疾患に対するスペシャリストが皆様のお悩みを解決します。詳しくはHPメニューをご参照ください。
STROKE LAB代表の金子唯史が執筆する 2024年秋ごろ医学書院より発売の「脳の機能解剖とリハビリテーション」から
以下の内容を元に具体的トレーニングを呈示します。
STROKE LABではお悩みに対してリハビリのサポートをさせていただきます。詳しくはHPメニューをご参照ください

1981 :長崎市生まれ 2003 :国家資格取得後(作業療法士)、高知県の近森リハビリテーション病院 入職 2005 :順天堂大学医学部附属順天堂医院 入職 2012~2014:イギリス(マンチェスター2回,ウェールズ1回)にてボバース上級講習会修了 2015 :約10年間勤務した順天堂医院を退職 2015 :都内文京区に自費リハビリ施設 ニューロリハビリ研究所「STROKE LAB」設立 脳卒中/脳梗塞、パーキンソン病などの神経疾患の方々のリハビリをサポート 2017: YouTube 「STROKE LAB公式チャンネル」「脳リハ.com」開設 現在計 9万人超え 2022~:株式会社STROKE LAB代表取締役に就任 【著書,翻訳書】 近代ボバース概念:ガイアブックス (2011) エビデンスに基づく脳卒中後の上肢と手のリハビリテーション:ガイアブックス (2014) エビデンスに基づく高齢者の作業療法:ガイアブックス (2014) 新 近代ボバース概念:ガイアブックス (2017) 脳卒中の動作分析:医学書院 (2018) 脳卒中の機能回復:医学書院 (2023) 脳の機能解剖とリハビリテーション:医学書院 (2024)